17.1. 概述¶
机器人学是一个交叉学科,它涉及了计算机科学、机械工程、电气工程、生物医学工程、数学等多种学科,并有诸多应用,比如自动驾驶汽车、机械臂、无人机、医疗机器人等。机器人能够自主地完成一种或多种任务或者辅助人类完成指定任务。通常,人们把机器人系统划分为感知系统、决策(规划)和控制系统等组成部分。
近些年,随着机器学习的兴起,经典机器人技术出现和机器学习技术结合的趋势,称为机器人学习(Robot Learning)。机器人学习包含了计算机视觉、自然语言处理、语音处理、强化学习和模仿学习等人工智能技术在机器人上的应用,让机器人通过学习,自主地执行各种决策控制任务。
机器人系统按照涉及的机器人数量,可以划分为单机器人系统和多机器人系统。多机器人系统协作和沟通中涉及的安全和隐私问题,也会是一个值得研究的方向。最近机器人系统在室内自主移动 [Pan et al., 2020][Huang et al., 2018],道路自动驾驶 [Huang et al., 2021][Sun et al., 2021a][Sun et al., 2022b],机械臂工业操作等行业场景得到充分应用和发展。一些机器人基础设施项目也在进行中,如具备从公开可用的互联网资源、计算机模拟和 真实机器人试验中学习能力的大规模的计算系统RobotBrain。在自动驾驶领域,受联网的自动驾驶汽车 (CAV) 对传统交通运输行业的影响,“车辆计算”(Vehicle Computing) (如 图17.1.1)概念引起广泛关注,并激发了如何让计算能力有限使用周围的CAV计算平台来执行复杂的计算任务的研究。最近,有很多自动驾驶系统的模拟器,代表性的比如CARLA,支持安全RL、MARL、真实地图数据导入、泛化性测试等任务的MetaDrive [Li et al., 2021a],还有CarSim和 TruckSim,它们可以作为各种自动驾驶算法的训练场并对算法效果进行评估。另外针对自动驾驶的系统开发平台也不断涌现,如ERDOS, D3 (Dynamic Deadline-Driven)和强调模块化思想的Pylot,可以让模型训练与部署系统与这些平台对接。
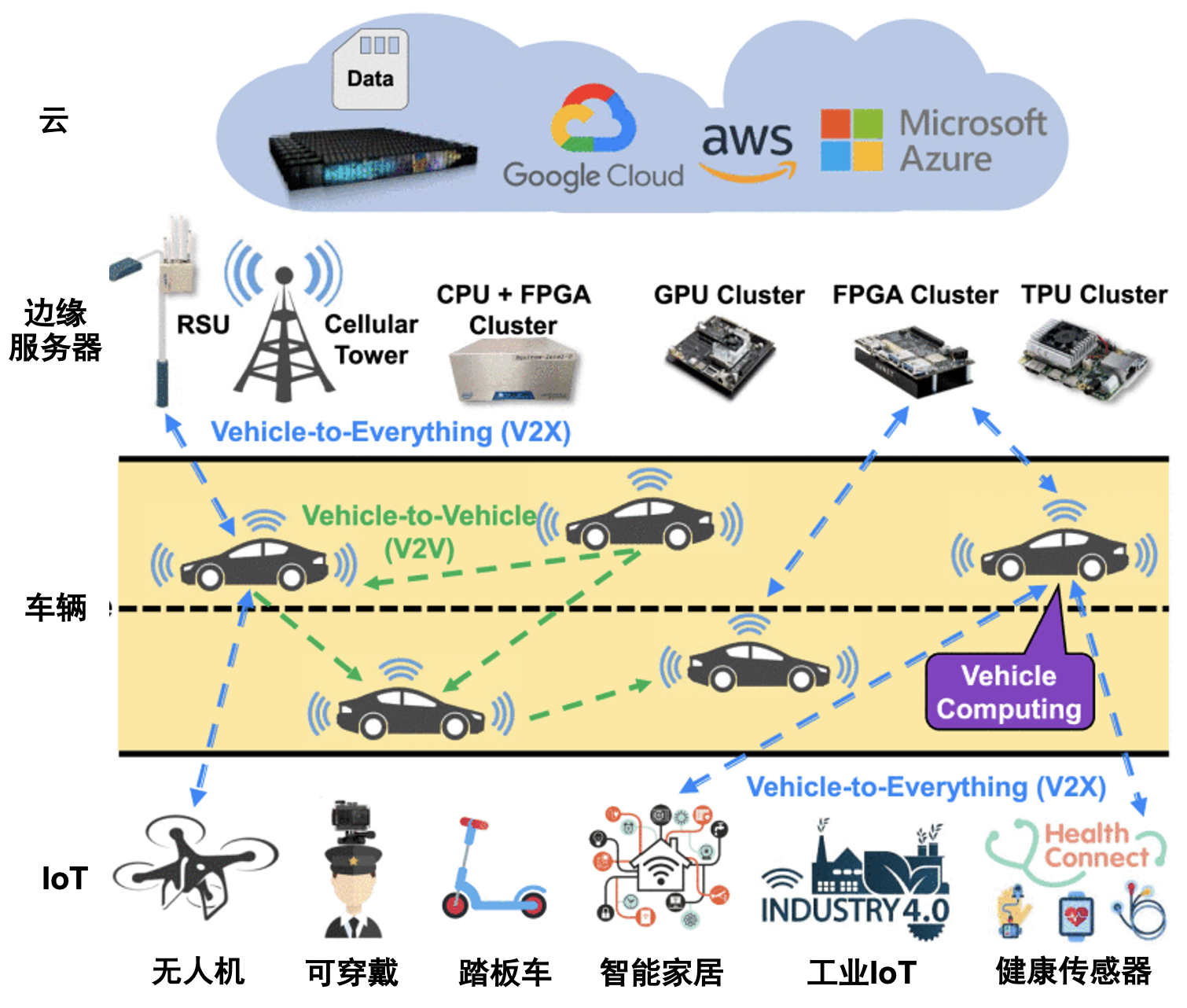
图17.1.1 车辆计算框架图 [Lu & Shi, 2021]¶
图17.1.2是一个典型的感知、规划、控制的模块化设计的自动驾驶系统框架图,接下来,我们也将按照这个顺序依次介绍通用框架、感知系统、规划系统和控制系统。
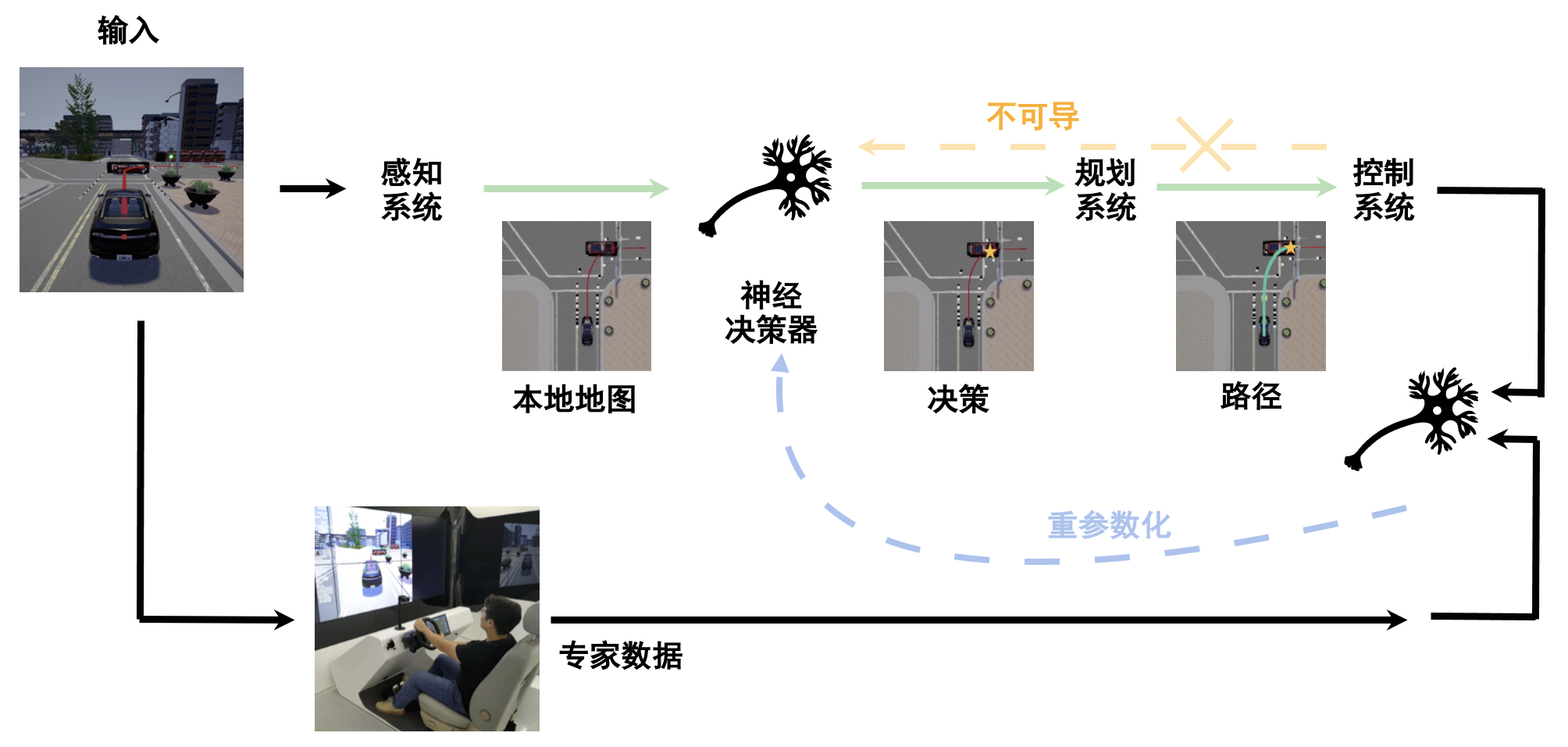
图17.1.2 通过模仿学习进行自动驾驶框架图。 绿线表示自主驾驶系统的模块化流程。橙色实线表示神经判别器的训练。而橙色虚线表示规划和控制模块是不可微的。但是决策策略可以通过判别器对控制行动的奖励,重新参数化技术进行训练,如蓝色虚线所示。¶